画像をクリックすると拡大します


極限環境とは、温度、圧力、磁力、pH 液体の水素イオン濃度指数を表す単位、放射線量などが、通常の生物が生息できる範囲を大きく超えた過酷な環境のことを指します。
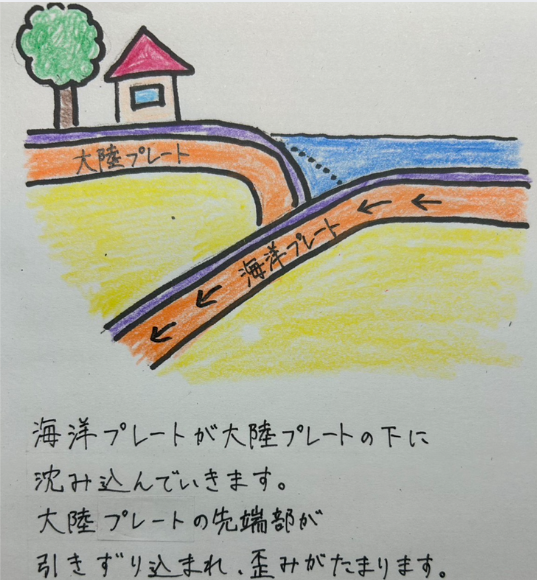
日本は、地震や台風、洪水、火山噴火など、さまざまな自然災害が多い国です。特に地震は、東日本大震災や熊本地震のような大きな地震が起こり、たくさんの人が被害を受けてきました。日本列島はいくつものプレートの境界に位置しているため、地下で起きる岩盤の「ずれ」により地震が頻繁に発生します。
~例として~
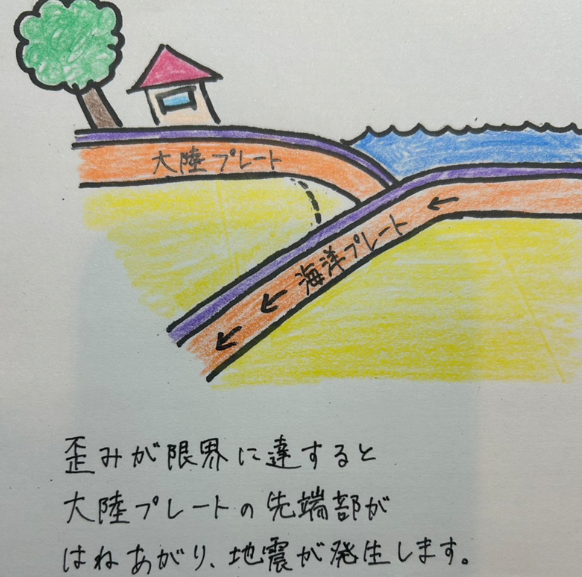
東日本大震災(2011年3月11日)の地震メカニズム
東日本大震災は、日本海溝で発生した海溝型地震で、太平洋プレートが北アメリカプレートの下に沈み込む際に溜まった歪みが解放され、M9.0の大規模な地震が発生しました。
画像をクリックすると拡大します
さらに建物の倒壊や津波など大きな被害をもたらし、日常生活に深刻な影響を及ぼす可能性もでてきます。
各家庭で防災グッズなど、地震に対する備えは進んできていますが、さまざまな課題が残っており、地域ごとの対応力や災害後の支援体制がまだ十分でない場合もあります。下記の表は、2000年からの日本で起こった地震の表です。
未来社会では、いかにして被害を減らし、迅速に立ち直れるかが、ますます重要になります。
~2000年から現在までの日本の地震~
| 年 | 地震名 | 概要 |
|---|---|---|
| 2000 | 鳥取県西部地震 | 家屋に被害があり、山崩れや家屋倒壊も発生しました。 |
| 2001 | 芸予地震 | 家屋に被害が出て、家屋倒壊も発生しました。 |
| 2004 | 新潟県中越地震 | 「新潟中越地震」として知られ、川口町(現在:長岡市)で震度7が観測。大規模な土砂崩れが発生し、多数の死者を出しました。 |
| 2007 | 能登半島地震 | 家屋に被害が出て、多くの家が倒壊しました。 |
| 2007 | 新潟県中越沖地震 | 家屋に被害が相次ぎ、山崩れによって道路も寸断されました。 |
| 2008 | 岩手・宮城内陸地震 | 家屋などが損壊し、多くの地域で土砂災害が発生しました。 |
| 2011 | 東北地方太平洋沖地震 | 「東日本大震災」としている。震度7の地震により、津波、火災、原発事故が発生し、多数の死者を出しました。 |
| 2016 | 熊本地震 | 益城町(熊本県)で震度7の地震が2度発生。建物の倒壊、道路損壊が相次ぎました。 |
| 2018 | 北海道胆振東部地震 | 厚真町(北海道)で震度7を観測。山崩れが発生し、大規模な停電が続きました。 |
| 2024 | 能登半島地震 | 志賀町と輪島市(石川県)で震度7の地震が発生。家屋や港湾施設に加え、津波や土砂災害、大規模な火災による被害が多数見られました。 |
(気象庁の「気象庁が名称を定めた気象・地震・火山現象一覧」をもとに作成)
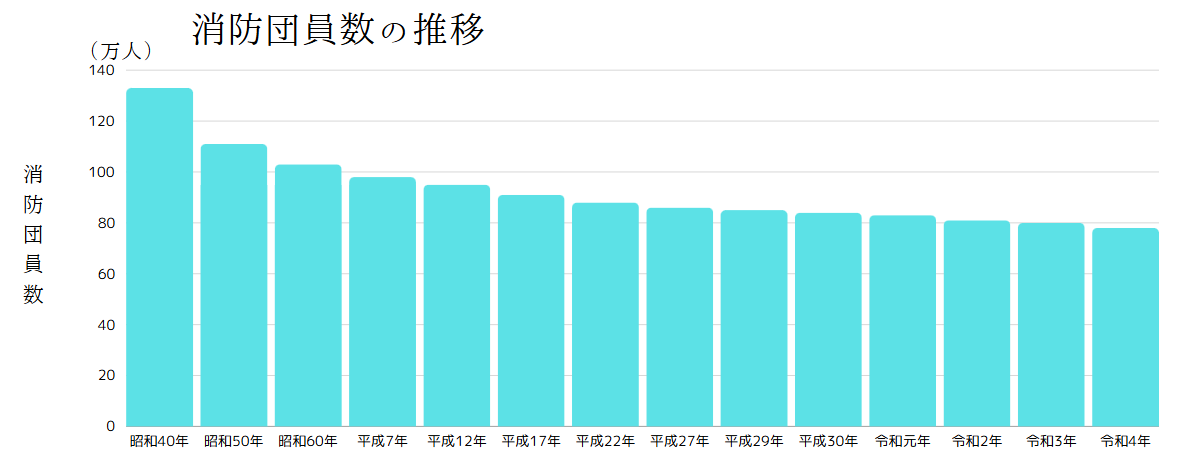
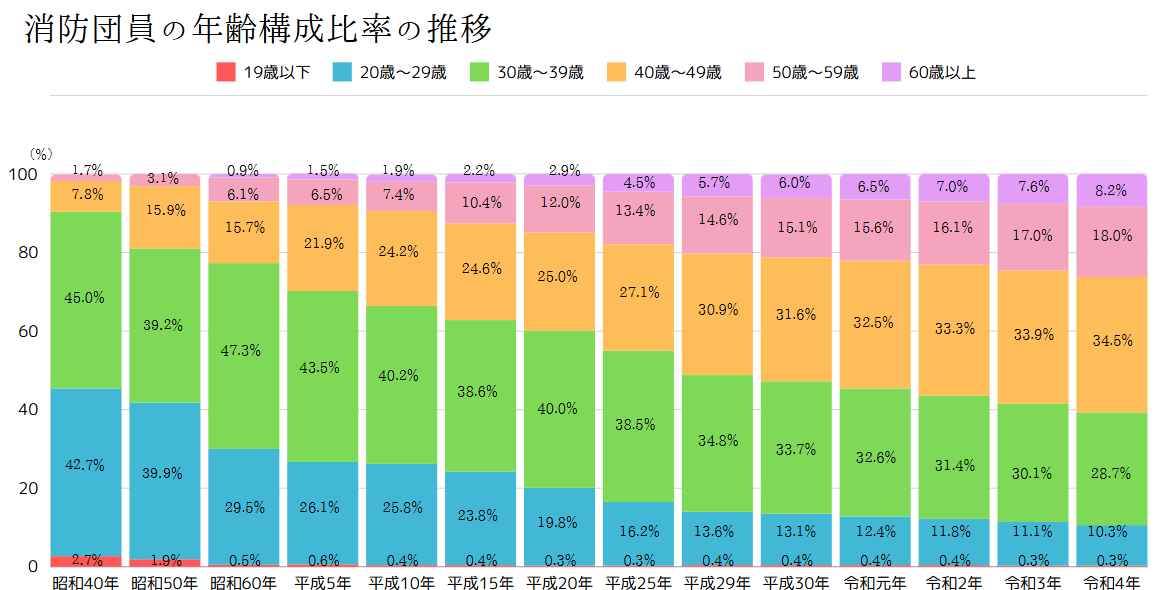
消防団とは大規模災害時において救助救出活動などを行う集団のことです。そんな消防団員数は年々減少しています。そのため、実際の災害時に活動できる人数は限られてしまいます。さらに消防団員の平均年齢の上昇も問題視されています。年齢が高い消防団員は豊富な経験を持っていますが、若手の消防団員に比べるとどうしても活動できる範囲が劣ってしまうため、消防団の作業が減少してしまう懸念があります。
画像をクリックすると拡大します
(総務省消防庁「令和4年消防白書」をもとに作成)
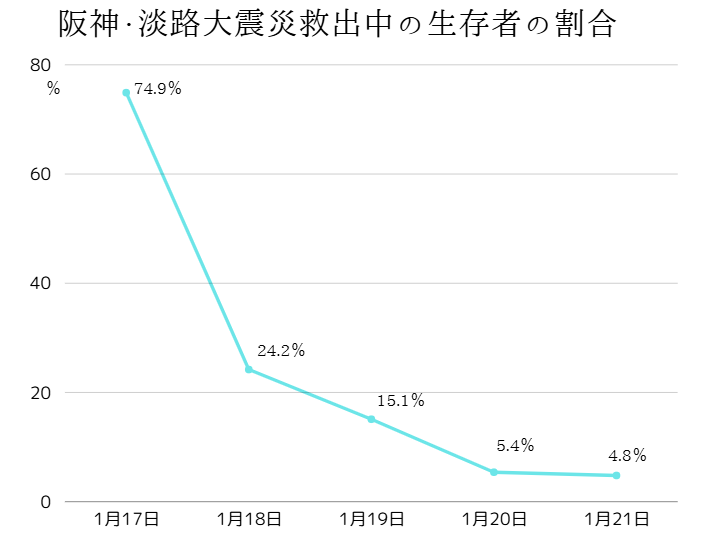
「72時間の壁」は、災害後の人命救助において特に重要な時間の目安です。災害から3日を過ぎると生存率が急激に下がるため、72時間以内に救助することが非常に大切とされていて、黄金の72時間とも言われています。下記のグラフをご覧ください。阪神・淡路大震災での救出中の生存者の割合データになります。この72時間という根拠としては、震災当日の救出率は74.9%でしたが、翌日には24.2%、3日目には15.1%、4日目には5.4%と急減しました。また、人間が水を摂取せずに生存できる限界が約72時間であることも理由として挙げられますが、一刻を争う救助が必要ということがわかります。
画像をクリックすると拡大します
(国土交通省 近畿地方整備局「死者を減らすために」をもとに作成)
極限環境で動けるロボットの必要性は高まってきています。人間が入れない場所でも、素早く対応できる能力や耐久性、持続性があり、災害時や緊急事態において、危険な状況下でも人間の安全を確保しながら効率的な救助活動を行うことが可能です。震災においては、余震で建物が崩れると、救助活動にあたる救助隊の方が危険にさらされてしまうことがあります。こういった場合でも、災害で倒壊した現場でロボットを使って救助を行うことが安全であり、救助の時間短縮になります。極限環境移動が可能なロボットは、人間が入れないような瓦礫の隙間や、ガスが充満している場所にも入ることができるため、より安全に救助活動を行えます。 阪神淡路大震災以降、多くの企業や研究者が災害現場で使用できるロボットの開発が進められています。
画像をクリックすると拡大します
(チームメンバーが撮影)
~企業様紹介~
株式会社テムザックは、日本で数少ないサービスロボットの開発・製造・販売を専業とするロボットメーカーです。社会に役立つ意味のあるロボット【WORKROID
株式会社テムザックが開発した
ロボットの名称】の開発をミッションとし、これまでに、受付・案内ロボットを皮切りに、医療、レスキュー、警備、モビリティ、農業、建築など多岐にわたる分野で活躍するWORKROID
株式会社テムザックが開発した
ロボットの名称を開発されています。
画像をクリックすると拡大します
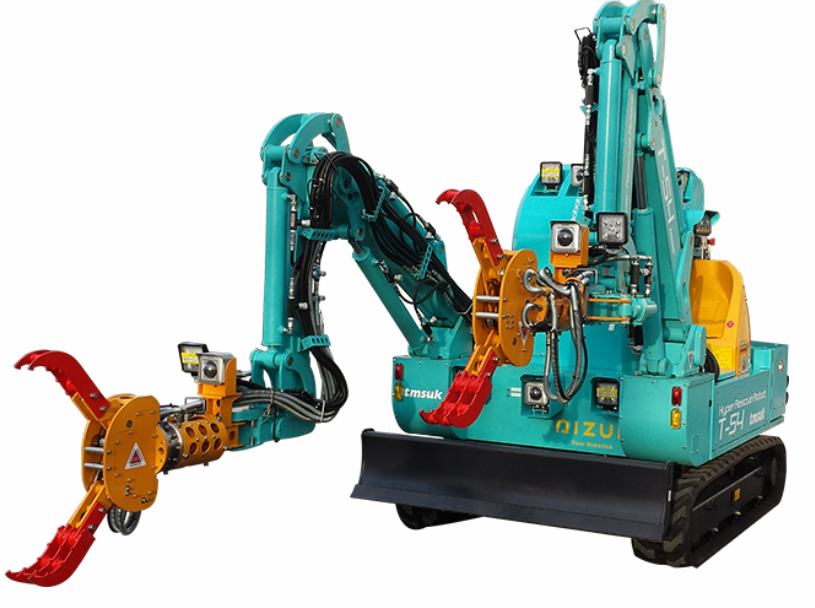
(引用元:株式会社テムザック)
上記は、テムザックが開発した災害レスキューロボット「援竜T-54」です。この最先端のロボットは、双腕のアームを活用して瓦礫を持ち上げ、人命救助を行うことが可能です。腕部には同期動作制御
複数の動きを同時に連動させて
操作する技術が導入されており、オペレーターが直感的に操作できるよう設計されています。

災害レスキュー援竜はマスター・スレーブ方式 1つの主装置(マスター)が複数の従属装置(スレーブ)を指示して動かすシステム。マスターが指示を出し、スレーブがその指示に従って動作します。を採用し、遠隔操作が可能と知り、この技術に興味を持ちました。日本は災害が多い国であり、未来社会においてこのロボットが果たす役割は非常に重要だと考えています。ぜひ、お話をお伺いさせてください。
救助活動のために援竜を展開するまでの準備時間(機材のチェックやセットアップ)にとどのくらいの時間がかかりますか?

約20分程のセットアップで、稼働可能です。
援竜は1回の準備期間を挟めば最長何時間利用することができるのでしょうか?
燃料タンクの大きさと作業する内容にもよりますが、基本的には朝から晩まで稼働させることができます。正確な時間は条件下にもよるので答えらませんが、1日は持つとお考えいただければ良いと思います。軽油を足すことですぐに継続稼働できるので、現場の声として稼働時間が問題視されたことはないようです。
現在援竜は全部で何台ありますか。保管場所はどこになりますか?
前モデルの「T-5」、「T-52援竜」、「T-53援竜」が福岡に各1台ずつ、最新モデル「T-54援竜」が福島に1台保管されています。全部で4台です。
援竜はどのようにして現場に運ぶのでしょうか?
基本的にはトラックを使って運びます。トラックを使って現場まで持っていき、スロープを用いてトラックから降ろし作業をするという形になってます。実は今、福島県会津若松市に置いている「T-54 援竜」を能登に運ぶ計画をしているのですが、そこでもトラックを用いようと考えています。
援竜が持てる最大重量を超えるものを運ぶ必要が出てきた場合どう解決していこうと考えていますか?
我々は1つのロボットで全てのタスク
課された仕事のことをやるのではなく、複数のロボットで協調して群れとして、1つのタスク
課された仕事のことを実行するための、群制御
複数のロボットの動きを一つの
ソフトウェアで管理・制御するシステム
というのを得意としています。なので、重いものを運ぶ必要が出てきた場合、複数のロボットを併用していくことで、この課題を解決していこうと考えています。
援竜は 人が持てないような瓦礫を撤去し、レスキュー隊員が救助するための動線をつくり、安全に作業が行えることを可能にするロボットと記事を拝見させていただきました。この人が持てないような瓦礫を撤去することの危険さや 時間がかかることを遠隔操作でできるのはすごいと思いました。実際に援竜を操作するオペレーターにはどのようなトレーニングが行われますか?
「T-53援竜」が戸畑消防に配備されたときには、実機で遠隔操作を体験してもらい、カメラを見ながら物をつかむ訓練を実施しました。
災害救助ロボットの搭乗者、操縦者の安全を守るためにどう工夫なさっているのでしょうか?
我々の開発する災害救助ロボットは、消防局の方たちから隊員を危険な場所に送りたくないから遠隔操縦できるロボットを開発してほしいとご要望をいただいたのがきっかけで開発しました。なので、我々の災害救助ロボットには人が乗らなくても遠隔で操縦することができます。そういった面では、ロボットの操縦者を直接現場に連れて行かなくてもよいということで、操縦者の安全を守っていると言えると思います。
実際に援竜を利用した方からのフィードバックや改善点をなにか頂いていたら教えていただきたいです。
足場の悪いところで瓦礫を除去するときのような、安定的に援竜を動かすことが求められる場面に対応するために、足回りのクローラーをもっと大きくして援竜を安定させてほしいという声をいただきました。
逆に、家の中から物を運び出すような、機動性が求められる場面に対応するために、クローラーをより小さくして小型化してほしいという声もいただきました。
このように、用途によっていろいろなご要望を受けるので、ラインナップをいくつか増やして様々な状況に対応できるようにしていきたいと考えています。
もう1つは、操作性に関する声で、我々は人間の動きと同期して動くロボットを開発しているんですけど、実際の災害現場で援竜のようなロボットを操作するのは、重機などの扱いに慣れてる人が多くて、その人達は普段ジョイスティック
ロボット操作などで使われる
入力デバイスで、棒状の形状を持ち、
上下左右に動かして機器の動きを
制御しますを利用して機械を操作してるので、ロボットの操作方法もジョイスティック
ロボット操作などで使われる
入力デバイスで、棒状の形状を持ち、
上下左右に動かして機器の動きを
制御します操作の方が楽だという声をいただいています。なので、使い勝手の良さなどについて利用者に都度話しを聞きながら製品開発を進めていきたいとも考えています。
前モデルから現在の援竜の開発に関しても、段階ごとにフィードバックを教えていただくことはできますか?
初期の「T-5」と「T-52援竜」に対する要望から、より小回りの利く小型機体が求められ、「T-53援竜」が開発されました。このモデルは小型化が進み、走行性能よりも腕の動きを重視していますが、メンテナンスのしにくさや走行性能への不満が指摘されました。その後、「T-54援竜」が登場し、メンテナンスのしやすさを改良し、クローラ部分を二回り大きくして走行性能も向上させました。また、危険作業を行う際に人間が搭乗するスペースは不要と判断され、遠隔操作専用機として設計されました。
最後に援竜の開発エピソードを教えてください。
援竜の腕は7自由度(通常の建機は4自由度)かつ双腕であることから、例えば片腕で瓦礫を持ち上げながら、もう片方で物を取り出すといった細かい作業もこなせる点が評価されました。一方で、操縦者から「自由度があるが操作が複雑になる。より簡単に操縦できるようにしてほしい」との声もあがったため、同期動作制御
複数の動きを同時に連動させて
操作する技術を開発しました。モーターと異なり油圧で同期動作制御
複数の動きを同時に連動させて
操作する技術を行うことは難易度が高く、大学の先生なども巻き込んでアルゴリズム
問題を解決したり目標を達成するための手順や
計算方法のこと
開発を行うことで実現しました。また、災害救助の現場はとても過酷で、救助隊員の安全を守るためにもロボットの導入が必要ですが、ロボットにとっても厳しい環境であり、最初の試作機は暑さでコンピュータが停止することもありました。そこで、放熱や空気の取り込みを工夫し、ロボットが高温でも正常に動けるよう改良しました。こうした対策により、ロボット自体の保護と人命の安全確保が実現できました。
オンライン取材をさせていただきました。日本は地震や台風などの災害が多い国です。調べ学習を進める中で、災害時には何よりも人命救助のスピードが重要であることを改めて実感しました。危険な場所でも問題なく動くロボットが必要だと強く思いました。遠隔操作によって動くロボットが救助活動に参加することで、救助者の安全が守られ、効率的に人命救助が行われるのではないかと思いました。未来社会では、ロボット技術が更なる進化を遂げ、より安全で安心なものにしてくれる、頼もしい存在になる可能性を秘めていると感じます。
参照日:2024.10.24
株式会社テムザック「POWER-ROID 災害レスキュー」
参照日:2024.10.24
内閣官房「災害・人命救助の未来を変えるレスキューロボット」
参照日:2024.10.24
内閣府「太古から続く地球の営みから分かる 地震が起こるメカニズム」
参照日:2024.10.24
参照日:2024.10.24
参照日:2024.10.24
総務省消防庁「令和4年版 消防白書」
参照日:2024.10.24
東京都防災ホームページ「地震のメカニズム」
参照日:2024.10.24
国土交通省「死者を減らすために」