Soccer Robot
Table of Contents
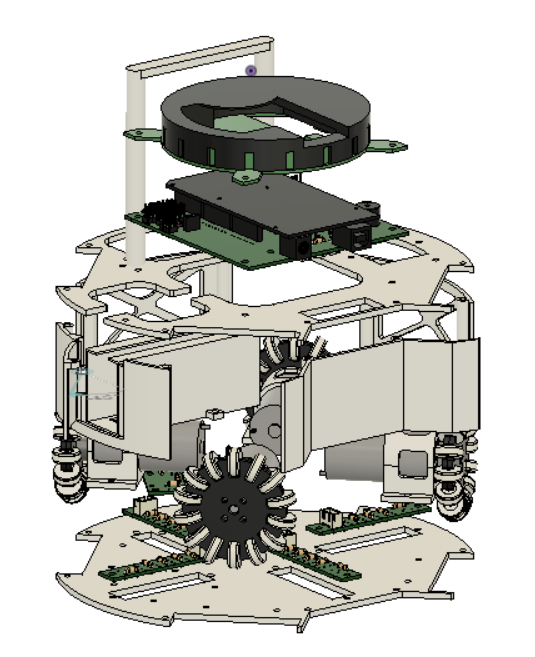
The team members design a robot according to a circuit system with Fusion 360. They also make a frame with a 3D printer. They improve the shape of a structure by making robots many times, trying to find an ideal shape.
The team members carefully examine the features of each part and design a circuit suitable for the part.
The team members created two types of robots, "Attack" and "Defense," based on thier design, and they programmed them according to each role.
The team members use autonomously controlled robots competing for scores for two-on-two soccer. They participated in this game.
In this competition, the robots follow a course to complete a given mission and compete for points based on the number of tasks they complete.
In this competition, the robots follow a course to complete a given mission and compete for points based on the number of tasks they complete.
Place: Dengiken's club room
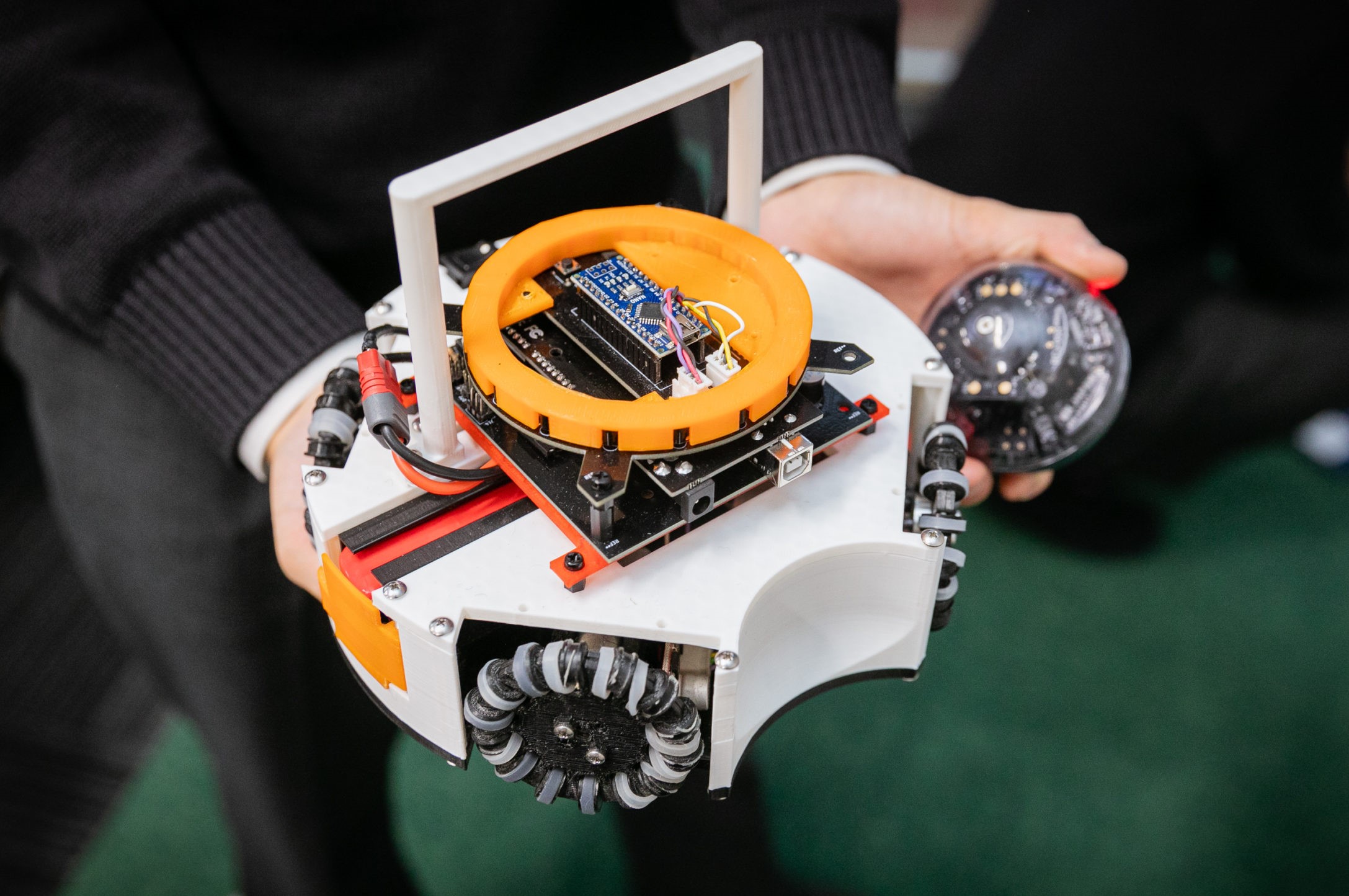
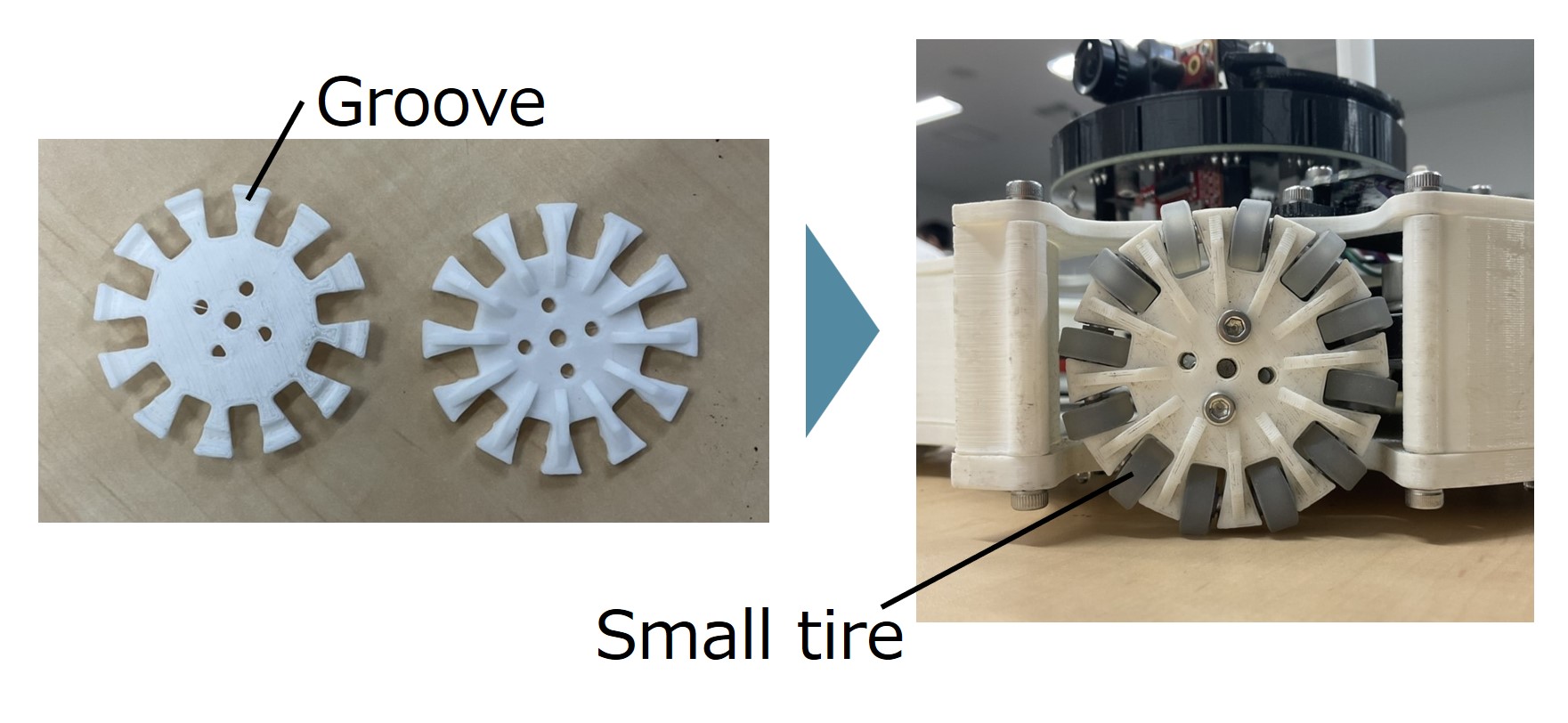
▲Omni wheel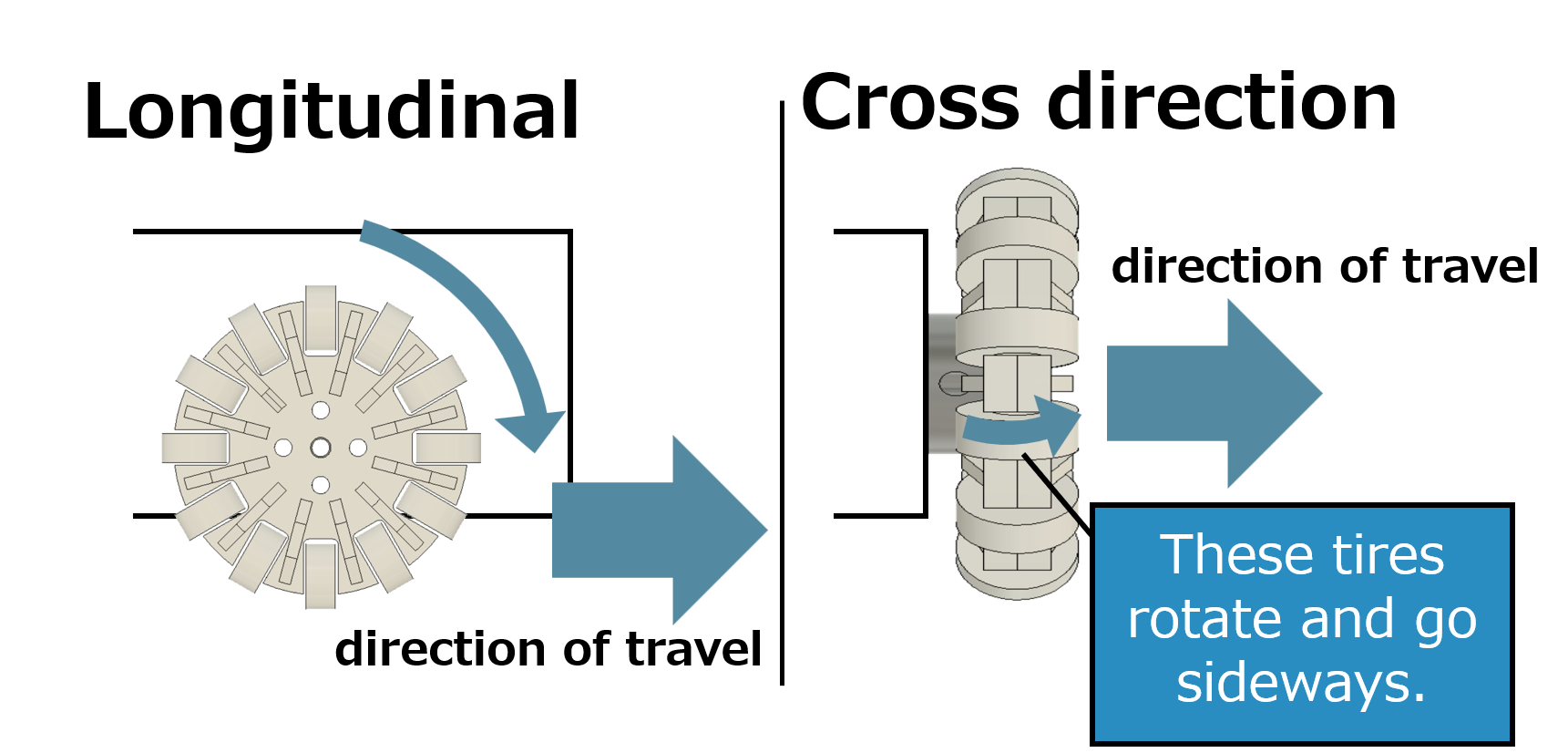 An omni wheel is a tire that, unlike a regular tire, can move in a lateral direction. parts and finished product.
An omni wheel is a tire that, unlike a regular tire, can move in a lateral direction. parts and finished product.
An omni wheel is a tire that, unlike a regular tire, can move in a lateral direction. that moves around effectively, which is essential for RoboCup Soccer. Most teams use an Omni wheelAn omni wheel is a tire that, unlike a regular tire, can move in a lateral direction. sold at stores. However, their team made one with a 3D printer.
Place: Dengiken's club room
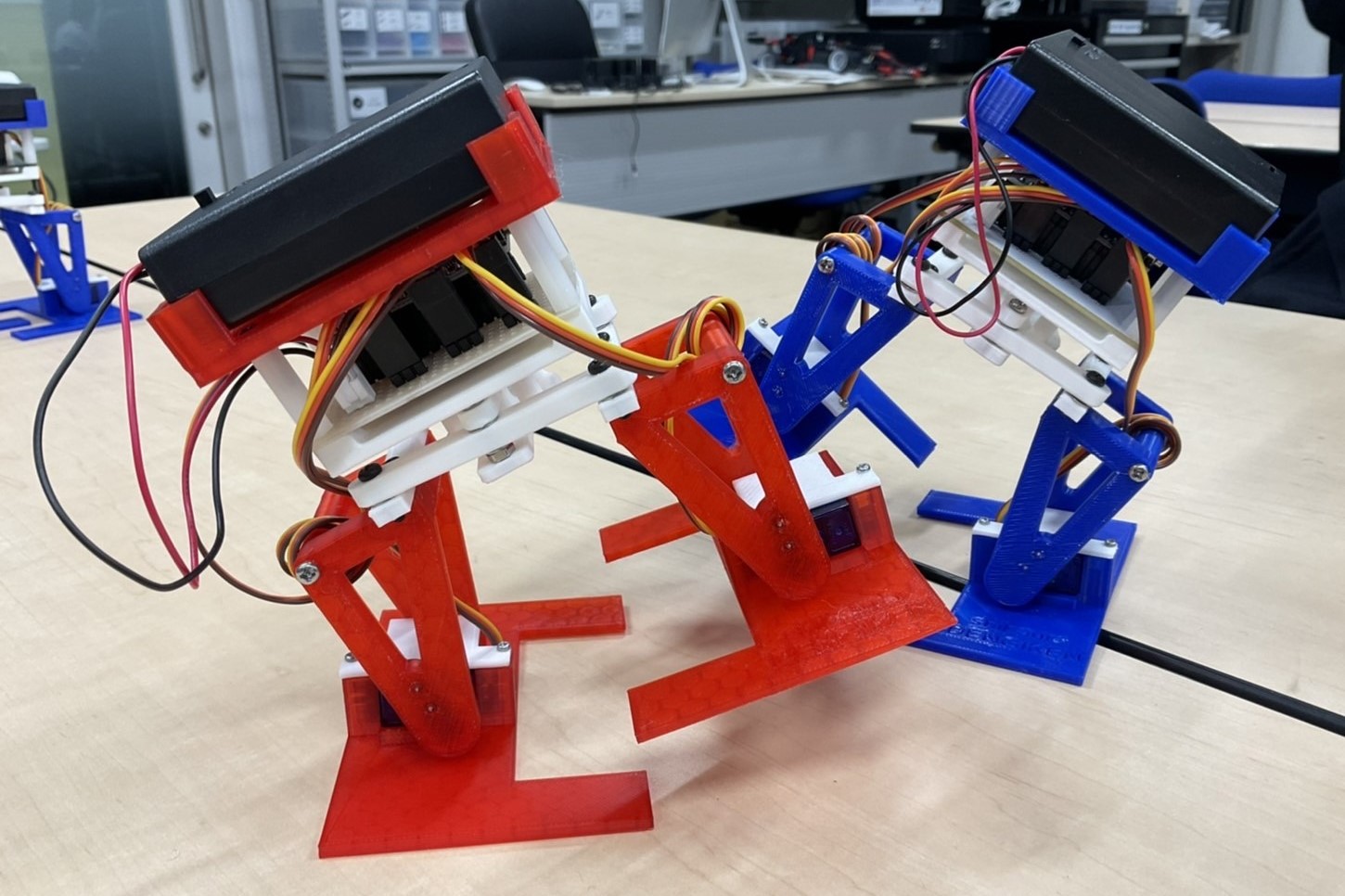
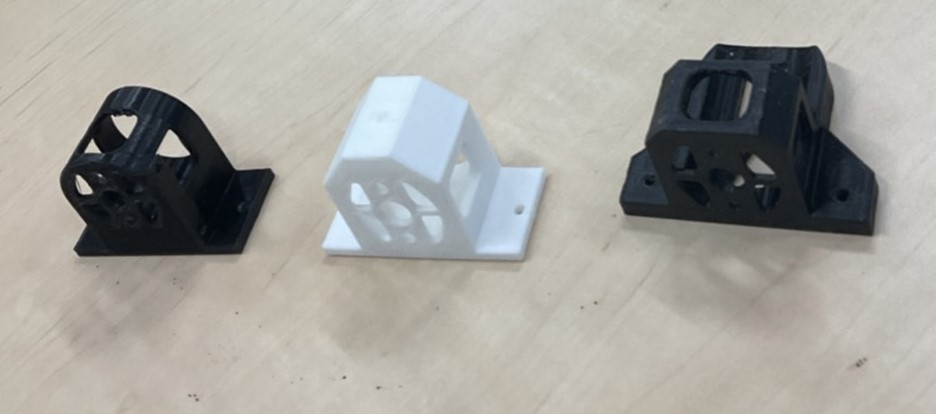
▲Motor Mounts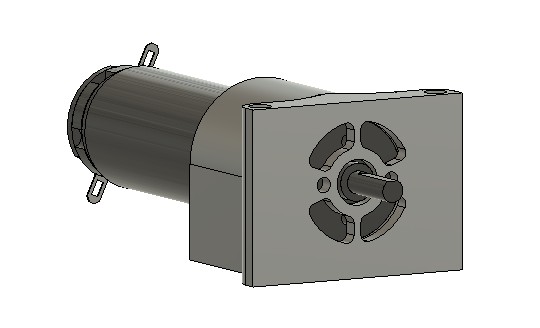 A Motor Mounts is a component that supports a motor. that the team members have improved many times
.
A Motor Mounts is a component that supports a motor. that the team members have improved many times
.
A Motor Mounts is a component that supports a motor. to increase its strength.
Why did you use a 3D printer?
We can make robots repeatedly with a 3D printer and find an ideal form.
How did you manage your schedule for the competition?
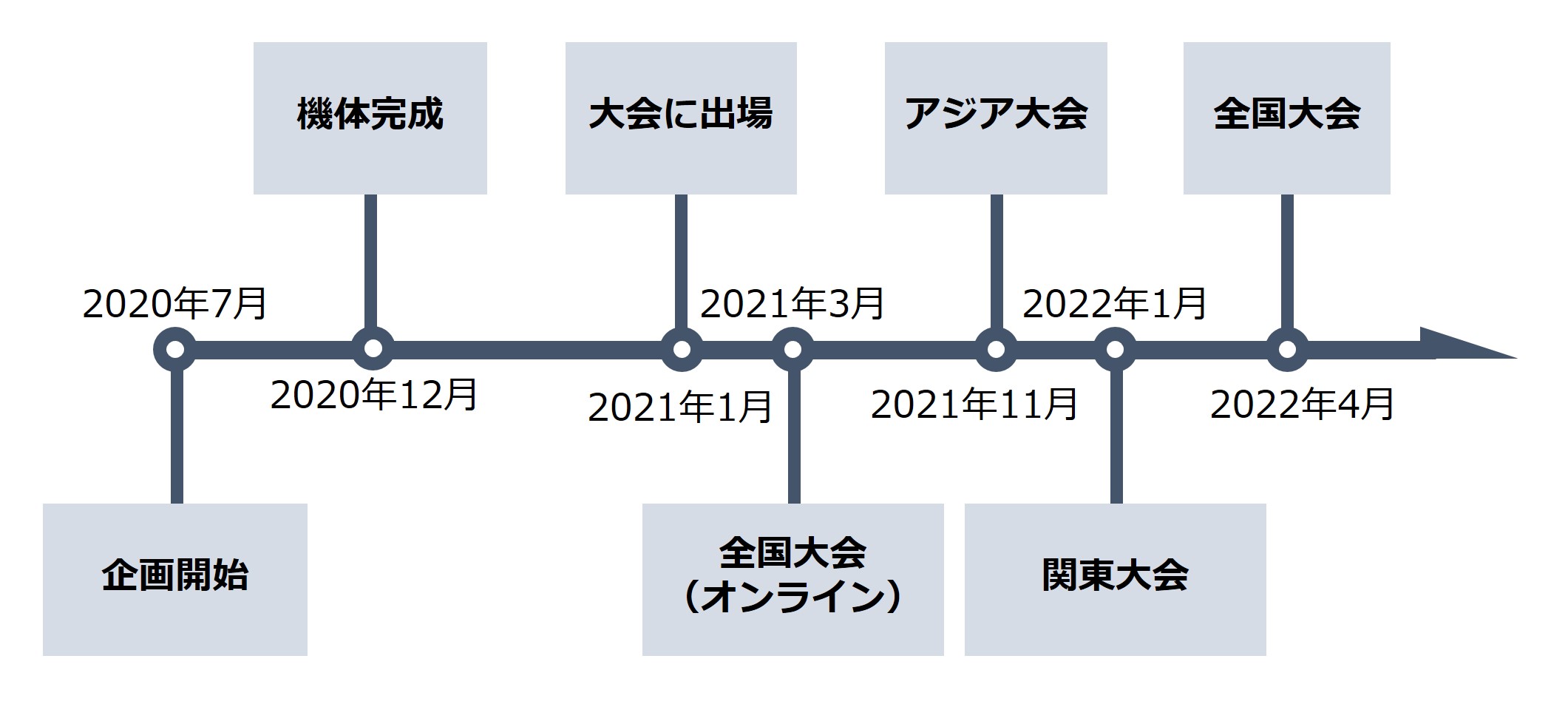
Made by us
Looks like this picture.
I see.
What were some of the challenges in creating the robots?
One of the difficulties was our original board did not work well, and we had to make objects repeatedly with a 3 D printer, as we made mistakes in setting up the printer.
What is your ideal vision for this project?
To win the world competition!