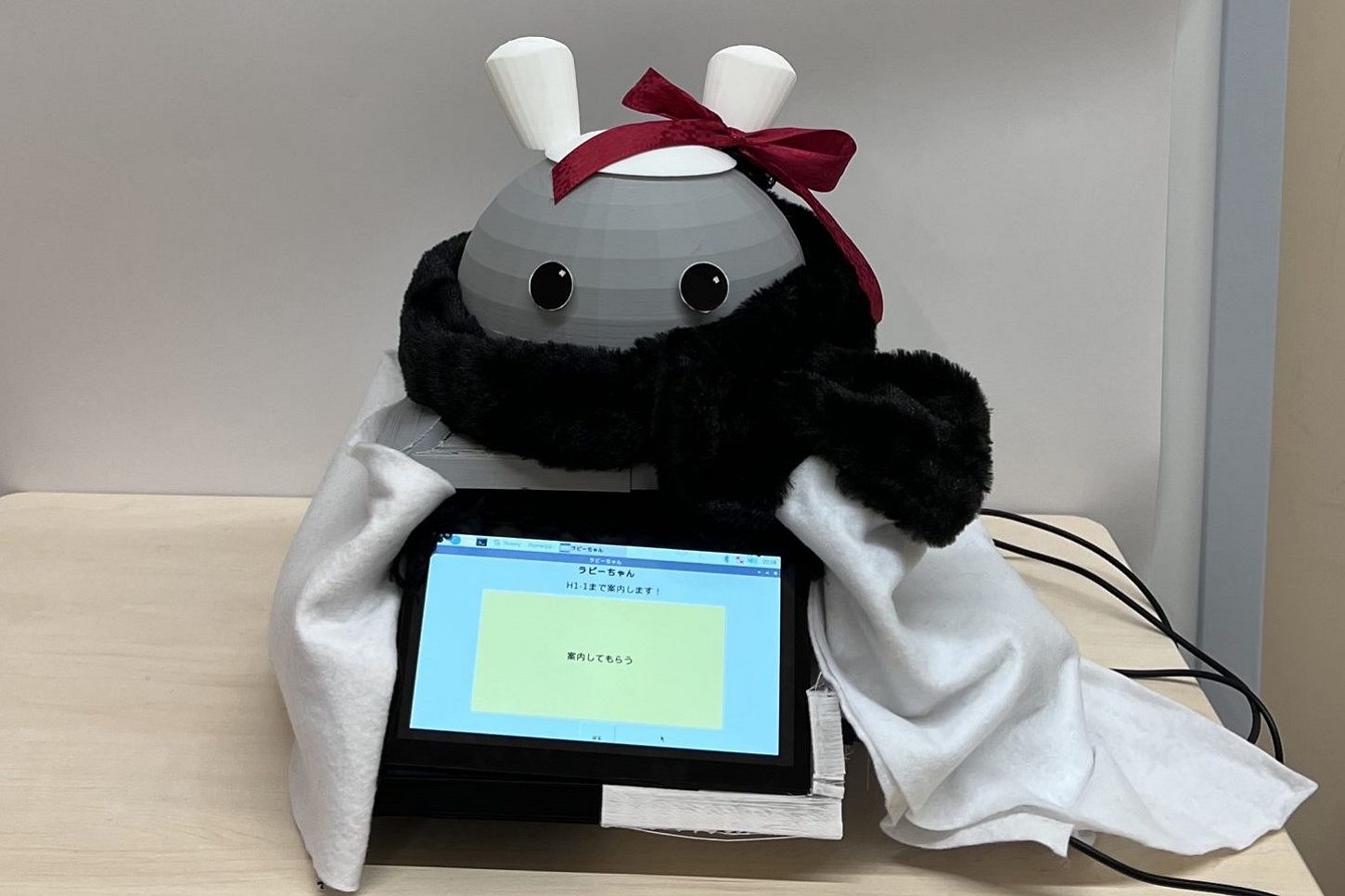
道案内ロボット
提供:SMART学会メンバー
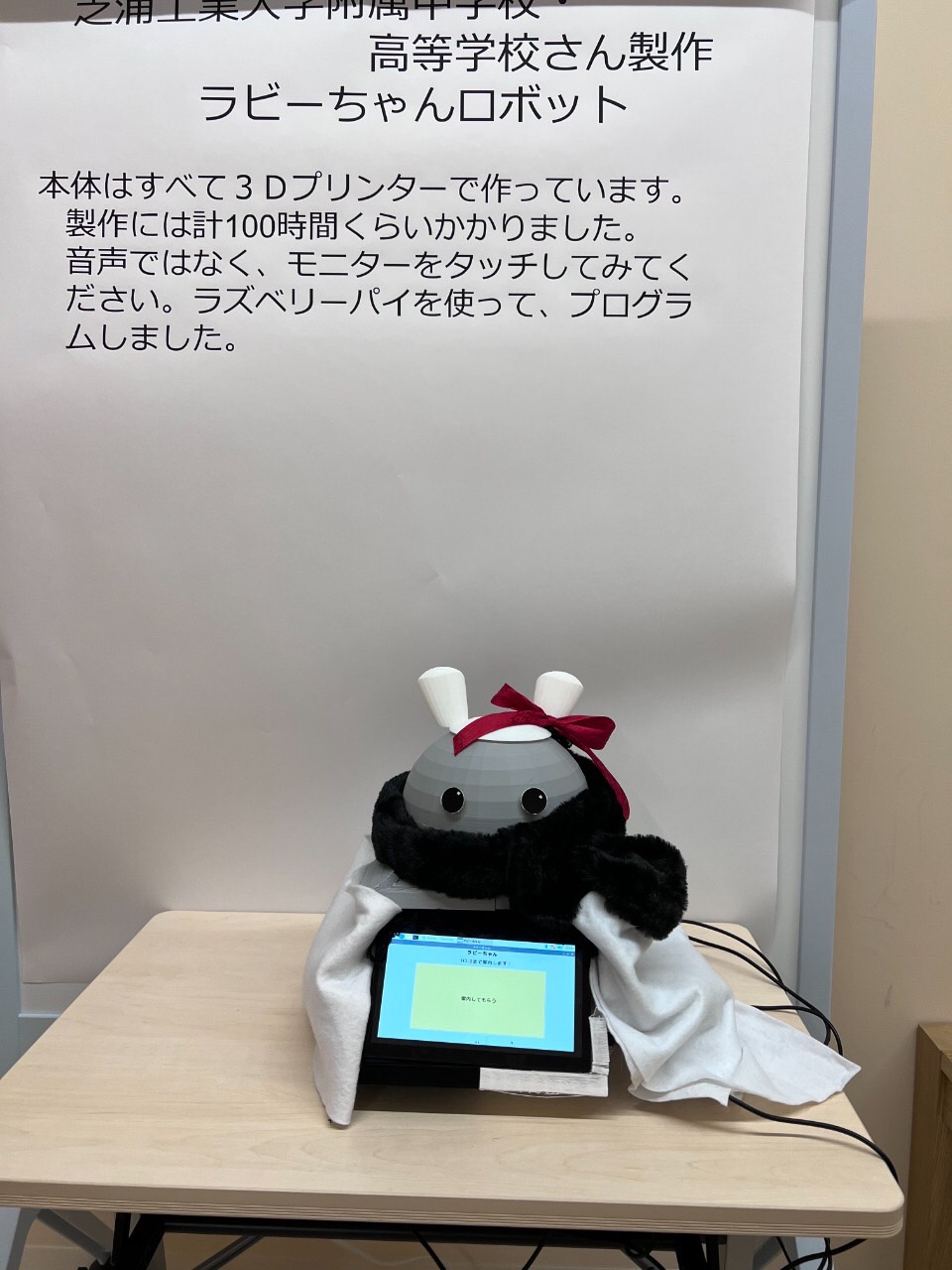
▲これは、実際に展示されている様子です。
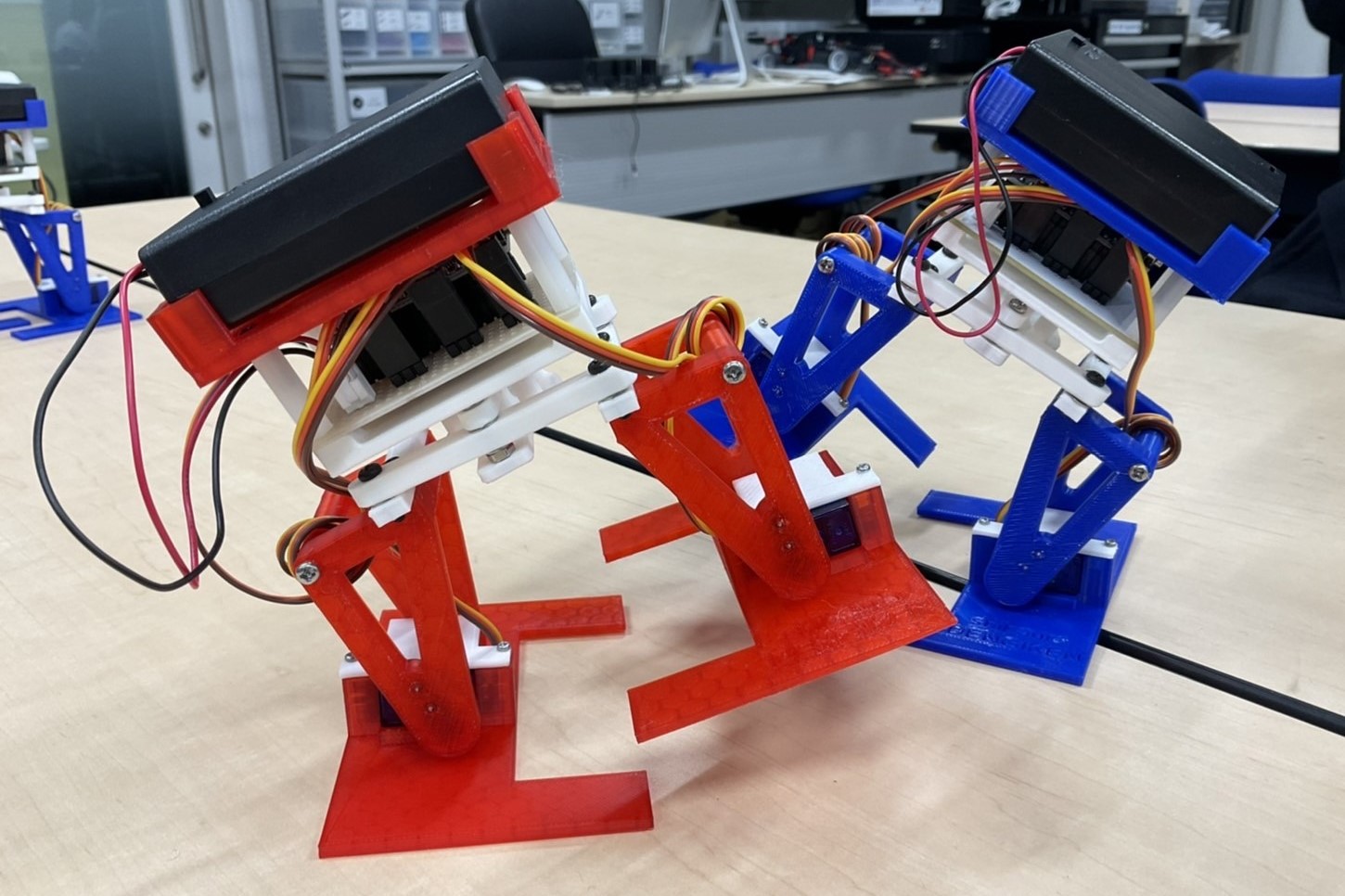
なぜ3Dプリンターを使用しているのですか?
このプロジェクトにおいて、ボディーの素材、制作方法は特に決まっていなかったため、
電技研 私たちが所属する部活、電子技術研究部の略称。各自がプロジェクトを持ち、自分のやりたい研究を行っている。らしさを出すために、3Dプリンターを用いて制作を行いました。
私たちが所属する部活、電子技術研究部の略称。各自がプロジェクトを持ち、自分のやりたい研究を行っている。らしさを出すために、3Dプリンターを用いて制作を行いました。
製作期間はどのくらいかかったのですか?
メンバー制作
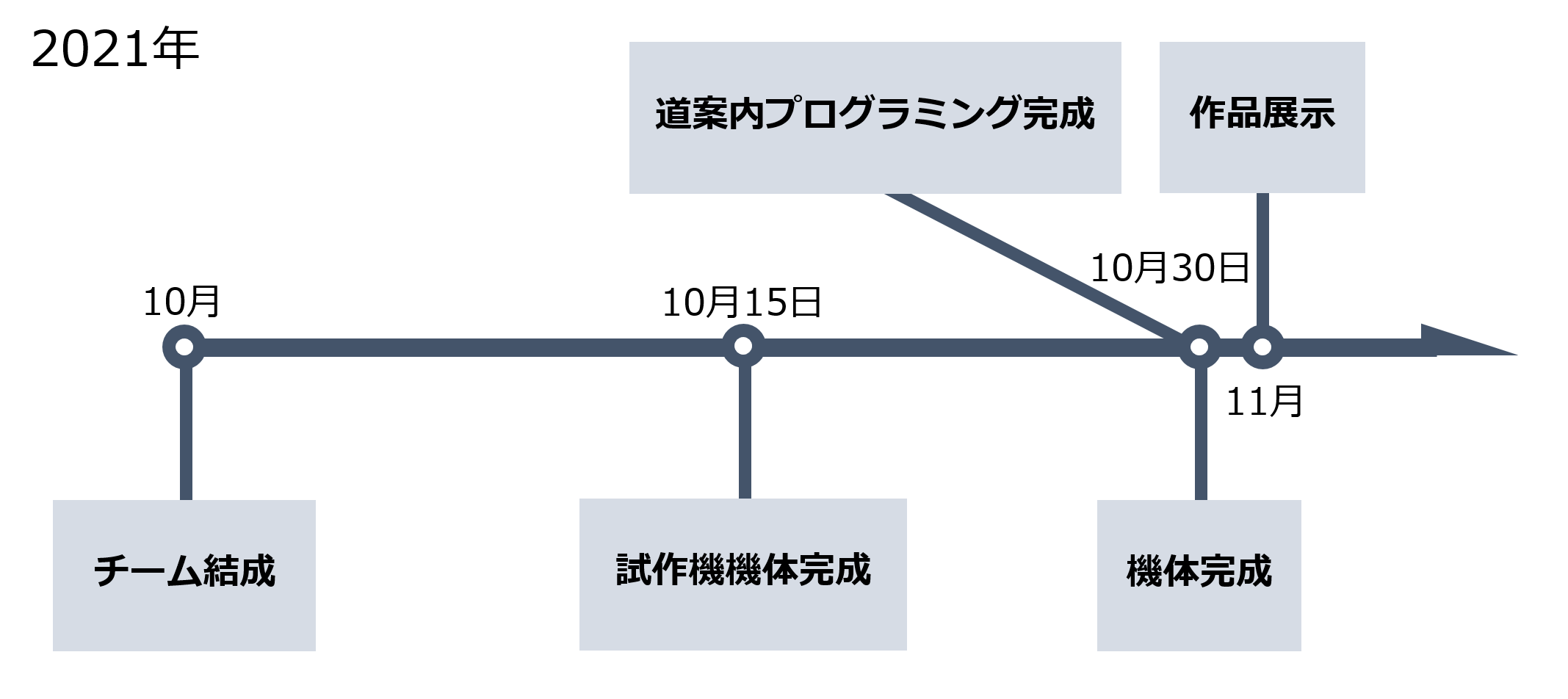
製作期間は、1か月ほどで、流れとしてはこのようになっています。
製作する上での苦労した点などを教えて下さい。
苦労した点は、3Dプリンターで印刷した、道案内ロボットのボディの接合が接着剤とボディの薄さの関係で非常に難しく、 やっとのことで接合したパーツがバラバラになってしまう事態が何度か発生したことです。
他にも課題点などがあれば教えてください。
提供:SMART学会メンバー
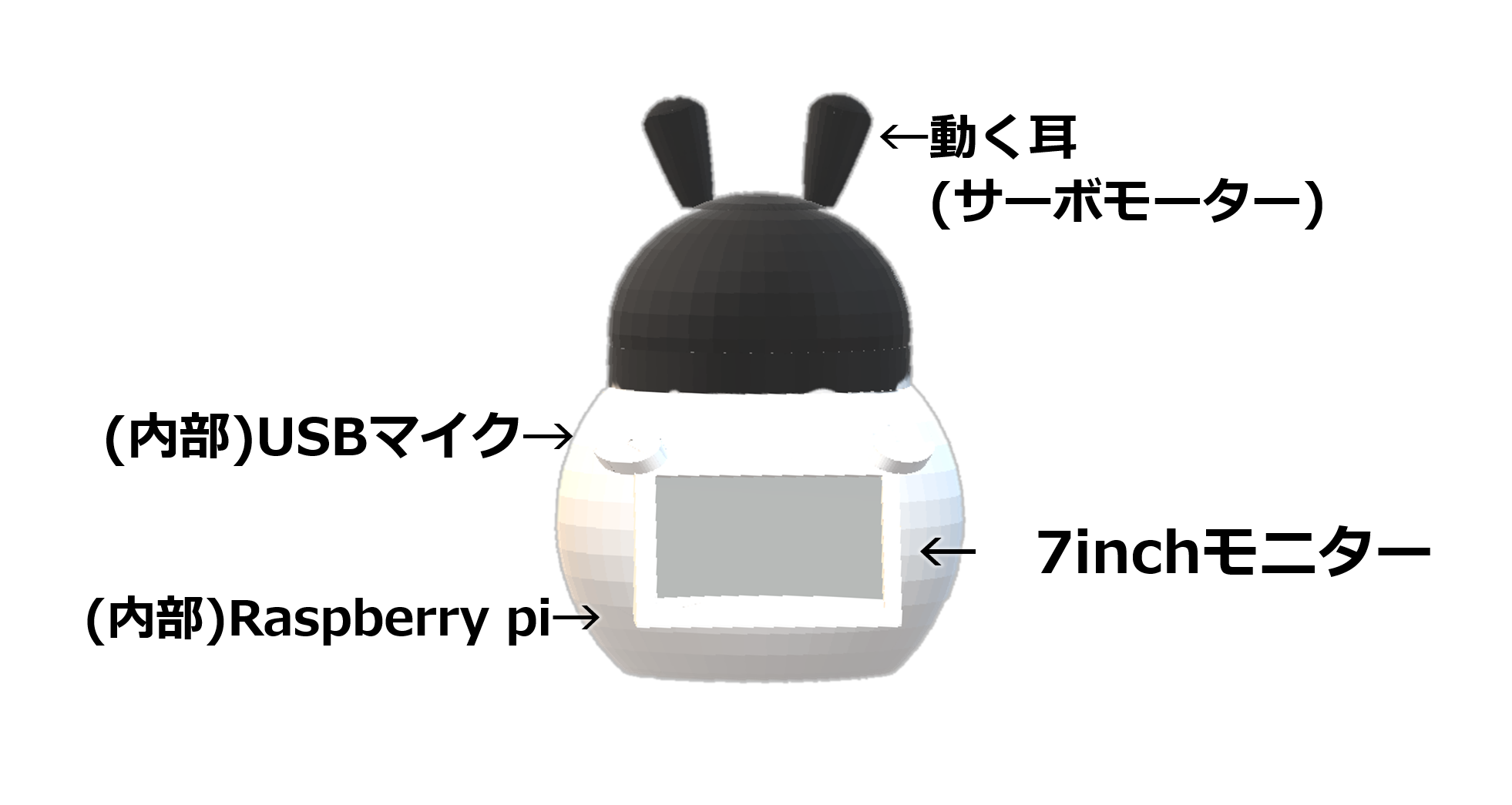
課題点としては、マイクの聞き取り精度が悪いという点です。 道案内ロボットの内部にマイクを組み込んでいるため、 声が届きづらくなってしまったことです。
私たちが所属する部活、電子技術研究部の略称。各自がプロジェクトを持ち、自分のやりたい研究を行っている。部員もまた、個性や特色などアピールする必要があります。そこで、電技研私たちが所属する部活、電子技術研究部の略称。各自がプロジェクトを持ち、自分のやりたい研究を行っている。では、他の高校では、あまり導入されていない3Dプリンターを使うことで、電技研私たちが所属する部活、電子技術研究部の略称。各自がプロジェクトを持ち、自分のやりたい研究を行っている。らしさを出していました。