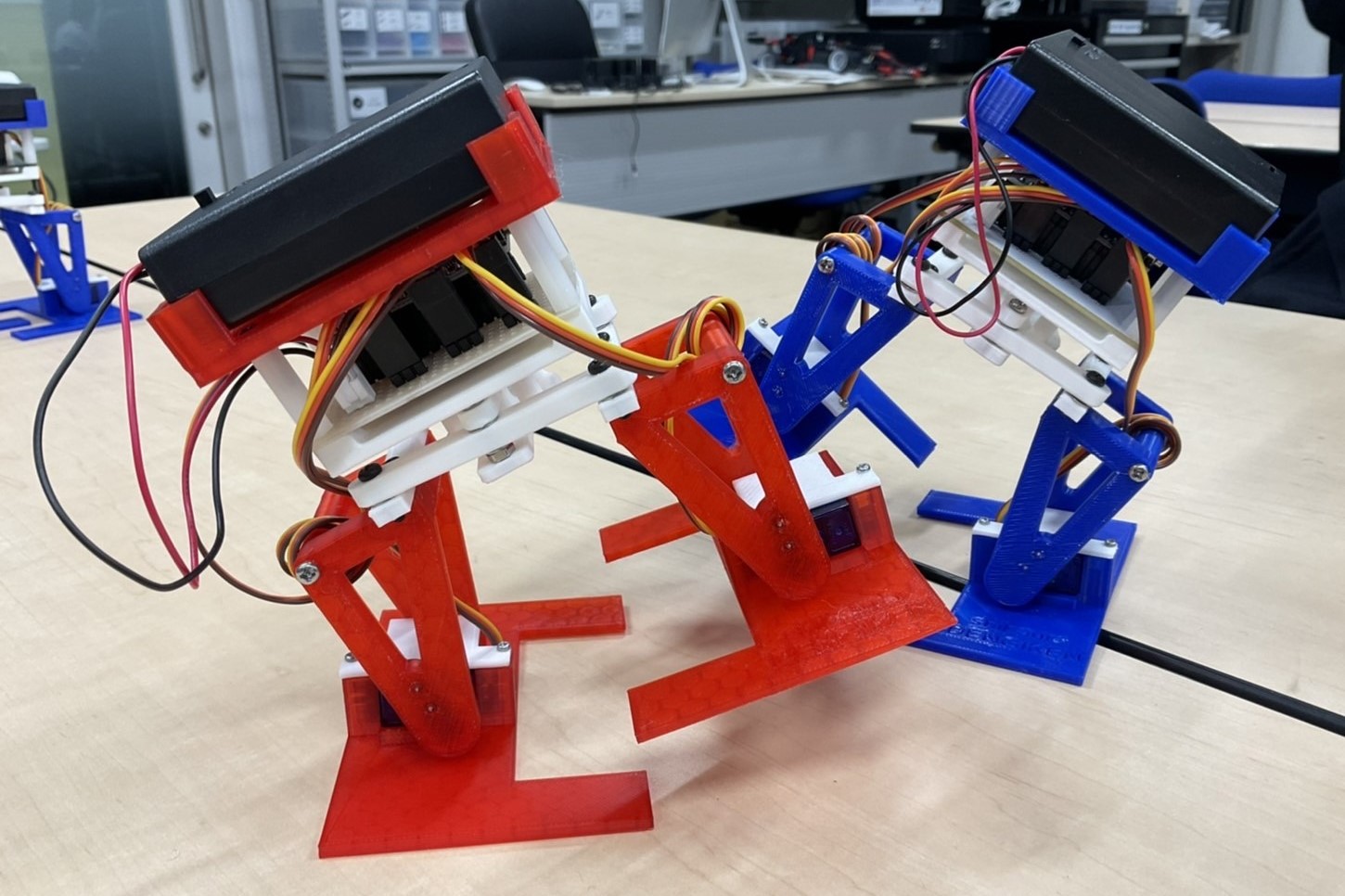
2足歩行ロボット
 体験型の講座のこと。電子技術研究部でも、様々なワークショップが行われている。を開催を目標として行なっています。
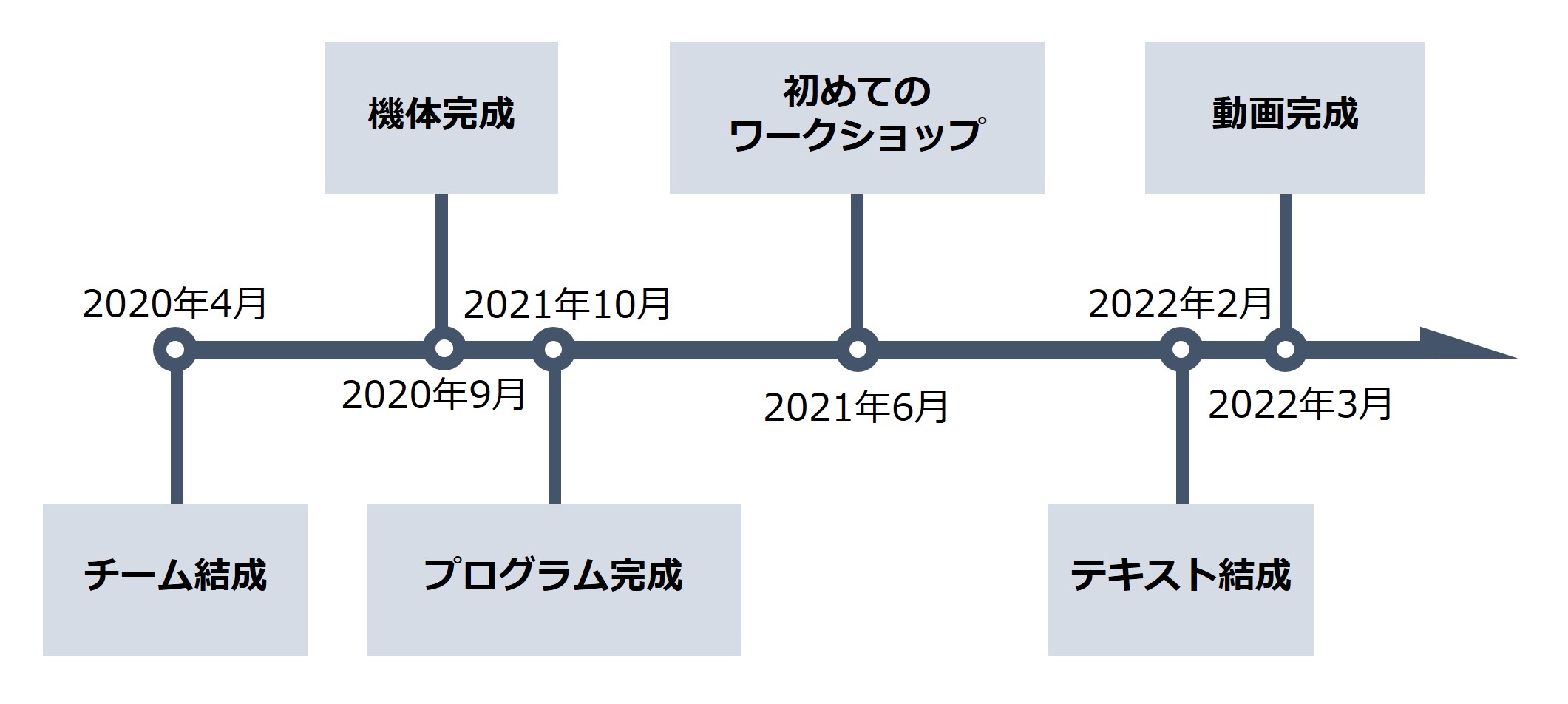
主な活動としては、大きく4つの工程がありました。
体験型の講座のこと。電子技術研究部でも、様々なワークショップが行われている。を開催を目標として行なっています。
主な活動としては、大きく4つの工程がありました。
「Fusion 360」を使用し、設計・印刷を行いました。
教本に掲載する例として以下のプログラムを作成しました。
メンバー制作
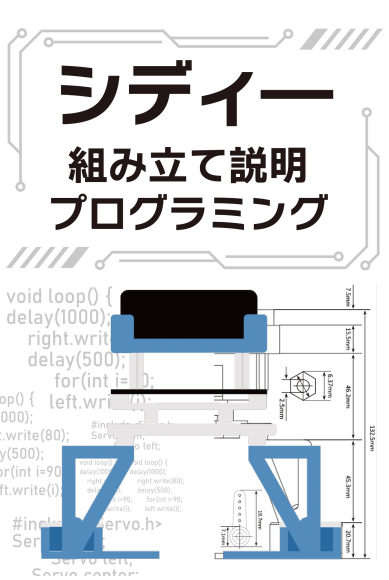
このテキストは、大きく三つの部門に分かれています。
一つ目は、2足歩行ロボットの組み立て説明書です。
二つ目は、プログラミングソフトのインストールについてです。
三つ目は、プログラミング言語の解説です。
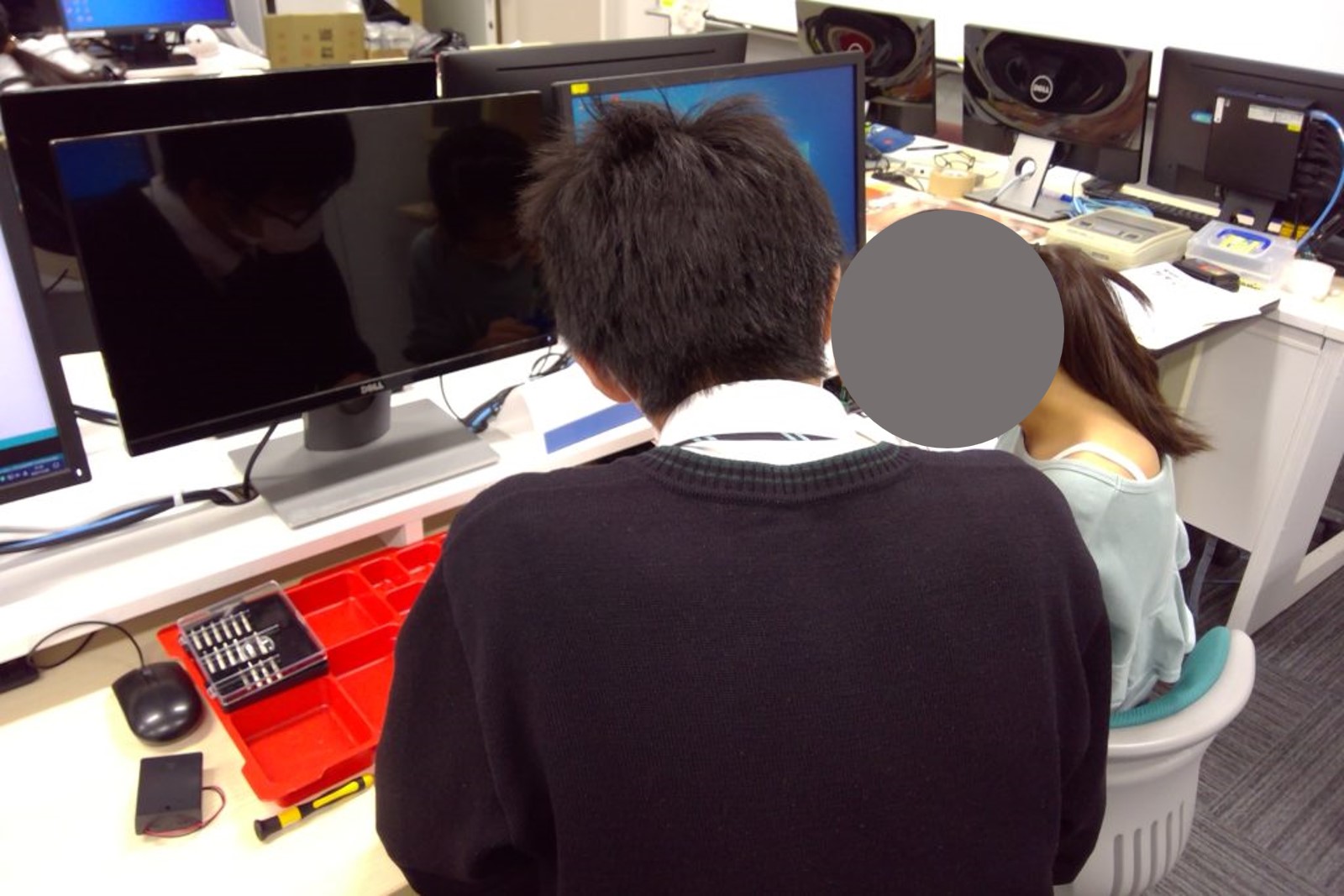
ワークショップ体験型の講座のこと。電子技術研究部でも、様々なワークショップが行われている。が終わった後、TAがいなくてもプログラムの改良ができるように、プログラムの書き方などの解説をした解説動画を制作しました。
体験型の講座のこと。電子技術研究部でも、様々なワークショップが行われている。を開催しています。
ワークショップ体験型の講座のこと。電子技術研究部でも、様々なワークショップが行われている。用のテキストの作成などもさせていただき、とても貴重な経験になりました。
私たちの企画は、小学校高学年の方へ向けたワークショップ体験型の講座のこと。電子技術研究部でも、様々なワークショップが行われている。開催を目的として掲げています。
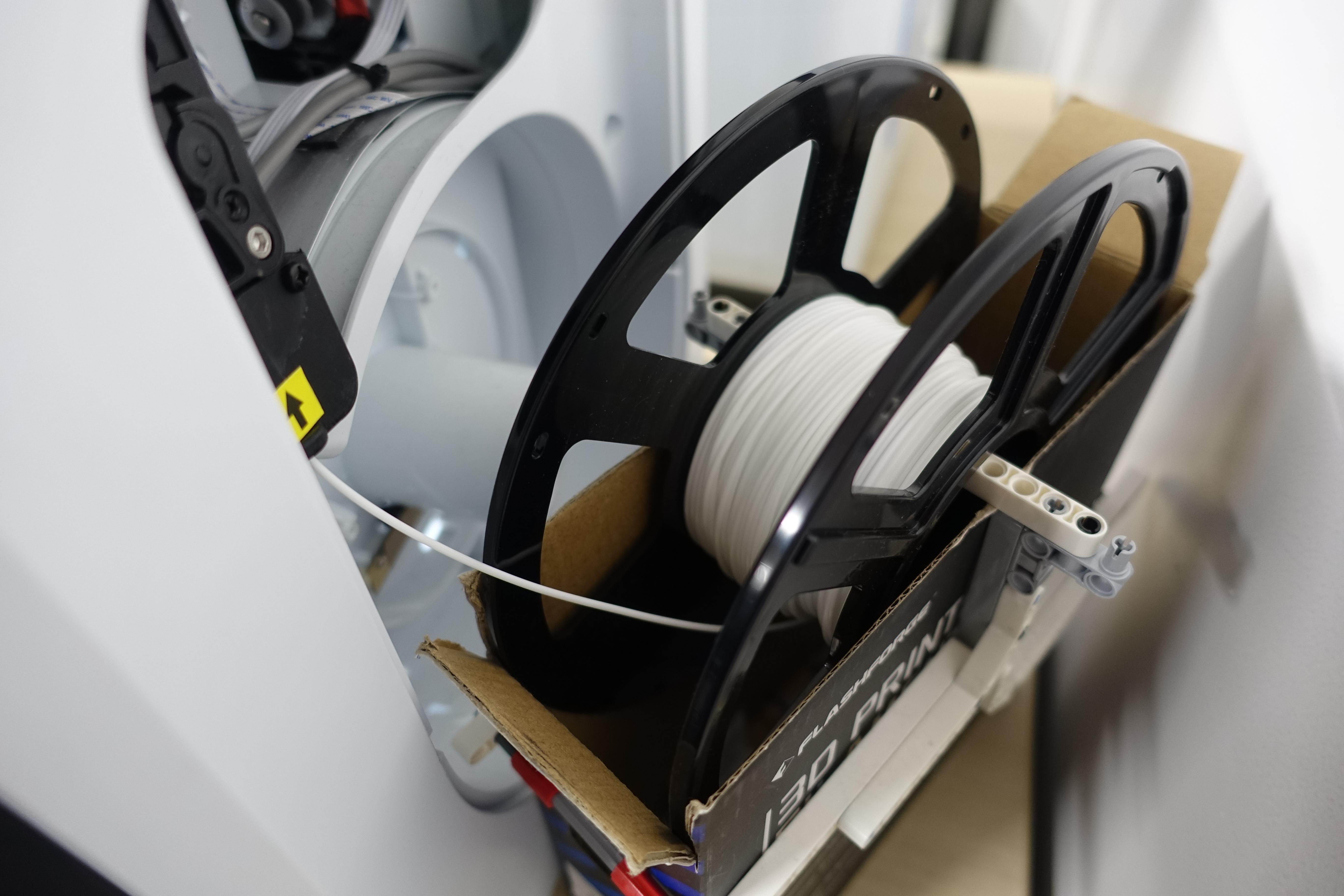
ですので、「できる限り、安価に抑えたい」と考え、
3Dプリンターを使用しています。
先述の通り、安価に抑えるため、足部につけているサーボモーターは、 大量購入が可能な安価なモーターにしています。ですので、 トルク(持ち上げる力。)が低く、軽量化をする必要がありました。 ですので、3Dプリンターを使用しています。
私たちの所属する電子技術研究部 私たちが所属する部活。略称は電技研。各自がプロジェクトを持ち、自分のやりたい研究を行っている。
は、
大小あわせて12個の3Dプリンターを保有しています。
ですので、自然と3Dプリンターで行う流れに至りました。
私たちが所属する部活。略称は電技研。各自がプロジェクトを持ち、自分のやりたい研究を行っている。
は、
大小あわせて12個の3Dプリンターを保有しています。
ですので、自然と3Dプリンターで行う流れに至りました。
メンバー制作
▲これは2足歩行ロボットの活動記録です。
 熱溶解積層方式で用いられるチューブ状の樹脂で、リールに巻くことができ、扱いやすいのが特徴。の色を変えることで、
様々な色のタイプが製作できるため、女子向けにも対応してるといえます。
ですので、「より様々な方にお越しいただいて、
自分の手で製作したロボットを自分のプログラミングで動かすという経験を通じて、感動していただいて、
少しでも今後、こういった3Dプリンター、
プログラミングなどに興味を持っていただく。」という目標を理想像とさせていただきます。
熱溶解積層方式で用いられるチューブ状の樹脂で、リールに巻くことができ、扱いやすいのが特徴。の色を変えることで、
様々な色のタイプが製作できるため、女子向けにも対応してるといえます。
ですので、「より様々な方にお越しいただいて、
自分の手で製作したロボットを自分のプログラミングで動かすという経験を通じて、感動していただいて、
少しでも今後、こういった3Dプリンター、
プログラミングなどに興味を持っていただく。」という目標を理想像とさせていただきます。